
Normalizing Flows
NICE: NON-LINEAR INDEPENDENT COMPONENTS ESTIMATION
问题:什么是好的特征表示?(what is a good representation?)非线性的ICA问题。
回答: 好的特征表示能使数据模型更加简单(a good representation is one in which the distribution of the data is easy to model.)
方法: 构造相互独立信号源与可观测数据的可逆映射,与VAE,GAN模型有相似之处,主要与VAE比较。
Model
信号源相互独立:
$$
p_H(h)=\prod_d p_{H_d}(h_d)
$$
假设有可逆映射$f: x \rightarrow h$,那么观察数据的分布为:
$$
p_X(x)=p_H(f(x))|\det(\frac{\partial f(x)}{\partial x})|
$$
生成模型为:
$$
h \sim p_H(h) \\
x = f^{-1}(h)
$$
目标函数设置为对数似然,那么主要问题在于雅可比矩阵的行列式计算,下面给出如何构造MLP使雅可比矩阵行列式为1。这个MLP要构造一种特殊的层结构。
Coupling Layer
把$X$按维度切分为两部分$X_{I_1} \in \mathbb R^d, X_{I_2} \in \mathbb R^{D-d}$,分别映射为$Y_{I_1} \in \mathbb R^d,Y_{I_2} \in \mathbb R^{D-d}$
$$
\begin{align}
y_{I_1}&=x_{I_1} \\
y_{I_2}&=g(x_{I_2};m(x_{I_1}))
\end{align}
$$
其中$g: \mathbb R^{D-d} \times m(\mathbb R^d) \rightarrow \mathbb R^{D-d}$,那么计算雅可比矩阵的行列式简化为:
$$
\det \frac{\partial y}{\partial x}=
\det \begin{pmatrix}
I_d & 0 \\
\frac{\partial y_{I_2}}{\partial x_{I_1}} & \frac{\partial y_{I_2}}{\partial x_{I_2}}
\end{pmatrix}
$$
逆向有
$$
\begin{align}
x_{I_1}&=y_{I_1} \\
x_{I_2}&=g^{-1}(y_{I_2};m(y_{I_1}))
\end{align}
$$
Additive Coupling Layer
特殊地,如果取$g(a;b)=a+b$,有:
$$
\begin{align}
x_{I_1}&=y_{I_1} \\
x_{I_2}&=y_{I_2}-m(y_{I_1})
\end{align}
$$
使简化雅可比矩阵的行列式为1:
$$
\det \frac{\partial y}{\partial x}=
\det \begin{pmatrix}
I_d & 0 \\
\frac{\partial y_{I_2}}{\partial x_{I_1}} & I_{D-d}
\end{pmatrix}
= 1
$$
如果行列式为1,那么表明映射使保体积不变的,为了避免这种约束,添加缩放因子(有筛选隐变量的作用)。
$$
x_i \rightarrow S_{ii}x_i
$$
这样行列式值为:
$$
\det \frac{\partial y}{\partial x}=
\prod_i S_{ii}
$$
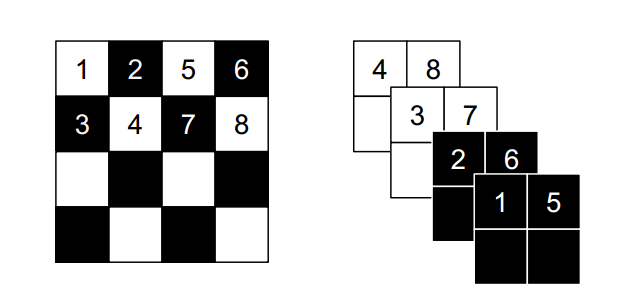
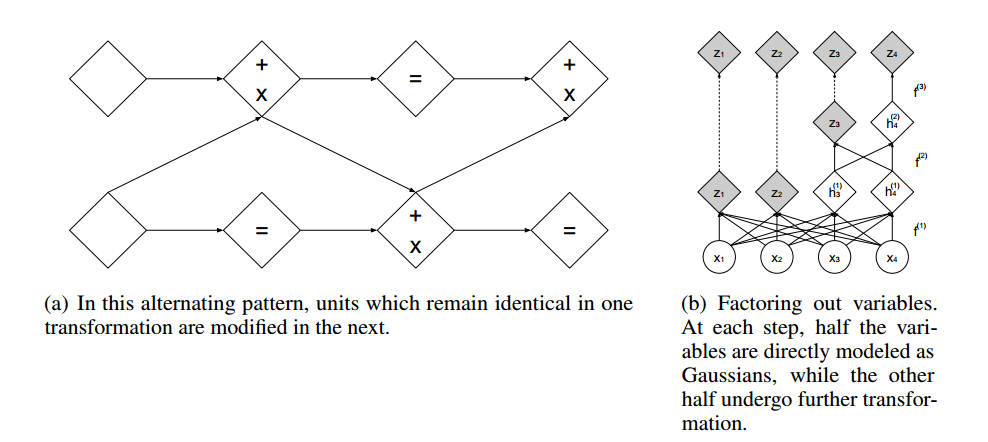
Combing Coupling Layers
叠层增加表达能力。
$$
\begin{align}
h_{I_1}^{(1)} &= x_{I_1} \\
h_{I_2}^{(1)} &= x_{I_2}+m^{(1)}(x_{I_1}) \\
h_{I_2}^{(2)} &= h_{I_2}^{(1)} \\
h_{I_1}^{(2)} &= h_{I_1}^{(1)}+m^{(2)}(x_{I_2}) \\
h_{I_1}^{(3)} &= h_{I_1}^{(2)} \\
h_{I_2}^{(3)} &= h_{I_2}^{(2)}+m^{(3)}(x_{I_1}) \\
h_{I_2}^{(4)} &= h_{I_2}^{(3)} \\
h_{I_1}^{(4)} &= h_{I_1}^{(3)}+m^{(4)}(x_{I_2}) \\
h &= exp(s)\odot h^{(4)}
\end{align}
$$
Loss Function
取最大似然作为优化目标:
$$
\begin{align}
\log p_X(x) &= \sum_i \log p_{H_d}(f_d(x))+\log |\det(\frac{\partial f(x)}{\partial x})| \\
&= \sum_i [\log p_{H_d}(f_d(x))+\log |S_{ii}|]
\end{align}
$$
其中信号源的先验可以取高斯或者logistic分布,取logistic分布在梯度下降方法有更好的表现。
高斯分布
$$
\log p_{H_d}=-(h_d^2+\log(2\pi))/2
$$logistic分布
$$
\log p_{H_d}=-\log(1+\exp(h_d))-\log(1+\exp(-h_d))
$$
Related Method(NICE, DBM, VAE, GAN)
DBM
对数似然难以计算,求解过程梯度运算需要MCMC,耗时一般较长。
VAE
使用随机编码器与不完美的解码器,使用ELBO而不是直接优化最大对数似然,这样优化结果可能不是最好的。VAE与DBM都是观测变量在给定隐变量下独立。
NICE
使用VAE的基本思想,但是使用确定编码器取代随机编码器。
VI, NF
Variational Inference with Normalizing Flows
问题:如何改进变分推断?
方法:变分推断的一个中心问题就是如何估计后验,在传统的方法中一般使用指数族分布,平均场近似等方法,这样做对变分函数有很大的限制,甚至很难与正确的后验吻合。在这里使用Normalizing Flow的方法使得变分函数具有更强的表达能力与灵活性。
Normalizing Flows, NF
Finite Flows
假设$f:\mathbb R^d \to \mathbb R^d$是可逆映射,$g=f^{-1},z’=f(z)$
$$
q(z’)=q(z)|\det \frac{\partial g}{\partial z’}|=q(z)|\det \frac{\partial f}{\partial z}|^{-1}
$$
通过上面的变换,我们可以由一个分布转换成另外一个分布。如果多次重复上述的变换,可以得到一个分布序列。雅可比行列式可以认为是链式法则。如果把分布想象为一堆粒子,那么可以形象地这一转化过程想象为流。
$$
\begin{align}
z_K &= f_K \circ ... \circ f_2 \circ f_1(z_0) \\
\log q_K(z_K) &= \log q_0(z_0)-\sum_{k=1}^K \log |\det \frac{\partial f_k}{\partial z_k}|
\end{align}
$$
一个有用的性质:
计算流的最终分布的期望可以不用计算雅可比矩阵。
$$
\mathbb E_{q_K}[h(z_K)]=\mathbb E_{q_0}[h(f_K \circ … \circ f_2 \circ f_1(z_0))]
$$
下面具体化映射函数,以及计算雅可比行列式
$$
\begin{align}
f(z) &= z+uh(w^Tz+b) \\
\psi(z) &= h'(w^Tz+b)w \\
|\det \frac{\partial f(z)}{\partial z}| &= |\det (\mathbb I+u\psi(z)^T)| = |1+u^T\psi(z)|
\end{align}
$$
上面的第三条式子式是关键,它表明了特殊形式的变换(称为,Invertible Linear-time Transformation)在计算雅可比行列式上可以有简单的结果。第一条式子形式上比较像残差网络中每一层的变换。
$$
\begin{align}
z_K &= f_K \circ ... \circ f_2 \circ f_1(z_0) \\
\log q_K(z_K) &= \log q_0(z_0)-\sum_{k=1}^K \log |1+u_k^T\psi_k(z_k)|
\end{align}
$$
可逆充分条件 :并非所以上述形式的映射都是可逆的,要可逆的充分条件是$w^Tu \geq -1$。
证明:
把变量$z$分为平行与垂直于$w$的两部分,即$z=z_{\perp}+z_{|}$,令$h(x)=\tanh(x)$
$$
f(z) = z_{\perp}+z_{|}+uh(w^Tz_{|}+b)
$$
$$
\begin{cases}
z_{\|}=\alpha \frac{w}{\| w\|^2} \\
z_{\perp}=y-z_{\|}-uh(w^Tz_{\|}+b)
\end{cases}
$$
$\alpha$参数要满足下面条件,
$$
w^Tf(z)=\alpha+w^Tuh(\alpha+b)
$$
上式如果关于$\alpha$单调,那么能够推出映射可逆
$$
w^Tu \geq -\frac{1}{h’(\alpha+b)} \geq -1
$$
更特殊地,可以令
$$
\widehat{u}=u+(m(w^Tu)-w^Tu)\frac{w}{\| w\|^2} \\
m(x)=-1+\log(1+\exp(x))
$$
Infinitesimal Flows
与有限流不同,无限流要经过无限次变换。变换过程由偏微分方程描述。
$$
\frac{\partial q_t(z)}{\partial t}=\mathcal T_t[q_t(z)]
$$
Lanevin Flow
粒子运动由随机微分方程(SDE)描述
$$
dz(t)=F(z(t),t)dt+G(z(t),t)d\xi(t) \\
\mathbb E[\xi(t)]=0 \\
\mathbb E[\xi_i(t)\xi_j(t')]=\delta_{ij}\delta(t-t')
$$
如果起始的粒子概率分布为$q_0(z)$,经过SDE方程后,概率$q_t(z)$由Fokker-Planck equation描述
$$
\frac{\partial q_t(z)}{\partial t}=-\sum_i \frac{\partial}{\partial z_i}[F_i(z,t)q_t(z)]+1/2\sum_{ij}\frac{\partial^2}{\partial z_i \partial z_j}[D_{ij}(z,t)q_t(z)] \
D=GG^T
$$
在机器学习领域,可以使用$F(z,t)=-\nabla_z \mathcal L(z), G(z,t)=\sqrt(2)\delta_{ij}$,$\mathcal L=\log p(z)$
最终的稳定概率分布为吉布斯分布
$$
q_{\infty}(z)\propto \exp(-\mathcal L)
$$
Hamiltonian Flow
Hamiltonian MC在广义坐标$(z,w)$下可以视为NF
动力学方程
$$
H(z,w)=-\mathcal L(z)+1/2w^TMw
$$
Loss Function
有了上面的等式可以计算VI中最常用的损失函数,ELBO
$$
\begin{align}
\mathcal L &= \mathbb E_{q_{\phi}(z|x)}[\log q_{\phi}(z|x)-\log p(x,z)] \\
&= \mathbb E_{q_0(z_0)}[\log q_0(z_0)-\log p(x,z_K)-\sum_{k=1}^K \log |1+u_k^T\psi_k(z_k)|] \\
\end{align}
$$
Real NVP
DENSITY ESTIMATION USING REAL NVP
一句话:NICE工作的基础上,构造可逆映射。(偏工程)
real-valued non-volume preserving (real NVP)
Model
可逆映射为:
$$
\begin{cases}
y_{I_1}=x_{I_1} \\
y_{I_2}=x_{I_2}\odot \exp(s(x_{I_1}))+t(x_{I_1})
\end{cases}
$$
$$
\begin{cases}
x_{I_1}=y_{I_1} \\
x_{I_2}=(y_{I_2}-t(y_{I_1}))\odot \exp(-s(y_{I_1}))
\end{cases}
$$
雅可比行列式:
$$
\det(\frac{\partial y}{\partial x})= \det(\begin{pmatrix}
I_d & 0 \\
\frac{\partial y_{I_2}}{\partial x_{I_1}} & diag(\exp(s(x_{I_1})))
\end{pmatrix})
$$
Masked Convolution
b是二值掩膜,可逆映射可以写为下面形式
$$
y = b\odot x + (1-b)\odot(x\odot \exp(s(b\odot x))+t(b\odot x))
$$
IAF
Improved Variational Inference with Inverse Autoregressive Flow
一句话:把可逆映射运用到变分推断中。
具体来说,就是对变分函数进一步具体构造(一个可逆映射),使其具有更强的逼近真实函数(后验概率)的能力。可以认为是NF的特例,工程上比一般的NF更易于实现?
Model
可逆映射为:
$$
z_0 = \mu_0 + \sigma_0 \odot \epsilon, \epsilon\sim \mathcal N(0,\mathbb I) \\
z_t = \mu_t + \sigma_t \odot z_{t-1}
$$
雅可比行列式:
$$
\det(\frac{dz_t}{dz_{t-1}})=\prod_{i=1}^D \sigma_{t,i}
$$
流终端的概率分布为:
$$
\log q(z_T|x)=-\sum_{i=1}^D(\epsilon_i^2/2+\log(2\pi)/2+\sum_{t=0}^T \log \sigma_{t,i})
$$
上面的式子可以用于VAE的变分部分。
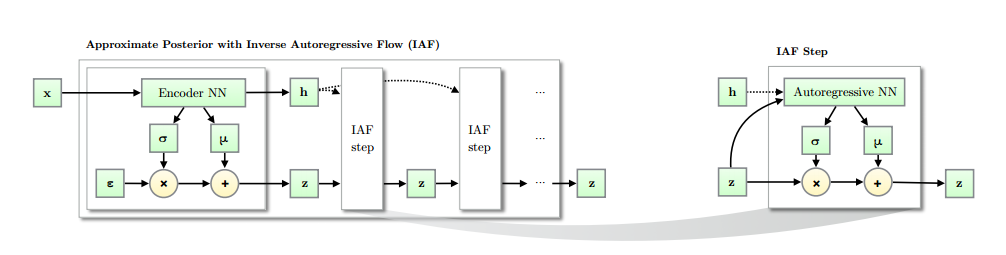
AutoregressiveNN使用了类似LSTM的方法
$$
[m_t,s_t]=AutoregressiveNN_t[z_t,h;\theta] \\
\begin{cases}
\sigma_t = sigmoid(s_t) \\
z_t = \sigma_t\odot z_{t-1}+(1-\sigma_t)\odot m_t
\end{cases}
$$
